Publications
You can also find a list of my publications on my Google Scholar profile.
2026
2025
2024
-
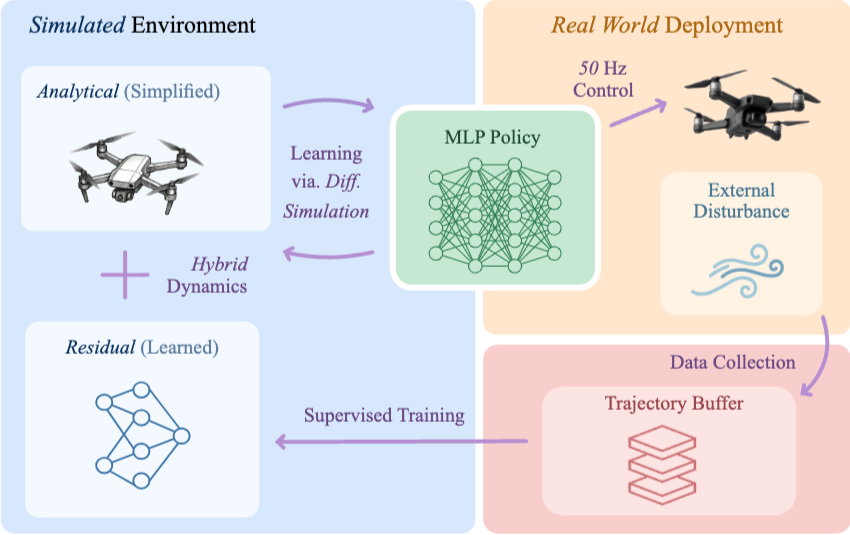
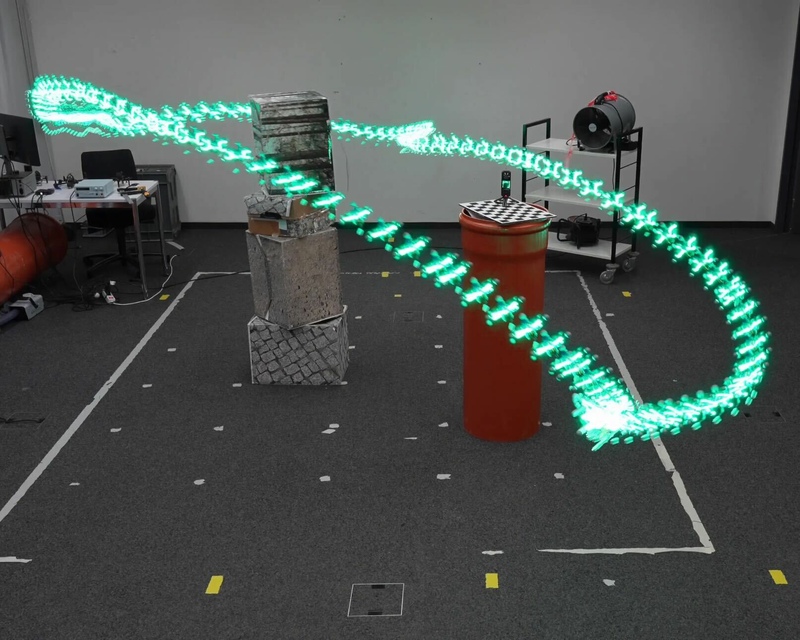
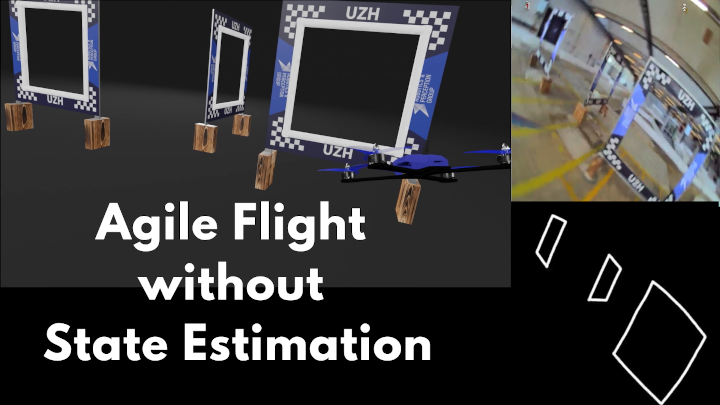 Demonstrating Agile Flight from Pixels without State EstimationRobotics: Science and Systems (RSS), 2024
Demonstrating Agile Flight from Pixels without State EstimationRobotics: Science and Systems (RSS), 2024


2023
-
 Autonomous Power Line Inspection with Drones via Perception-Aware MPCIn 2023 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2023
Autonomous Power Line Inspection with Drones via Perception-Aware MPCIn 2023 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2023